SHARON is an advanced decision support system designed for Search and Rescue (SAR) mission management. It guides coordinators through every mission phase—from gathering initial information about the missing person to planning search operations and completing the mission—providing strategic insights and real-time support.
Collects and store details about the missing person and the mission
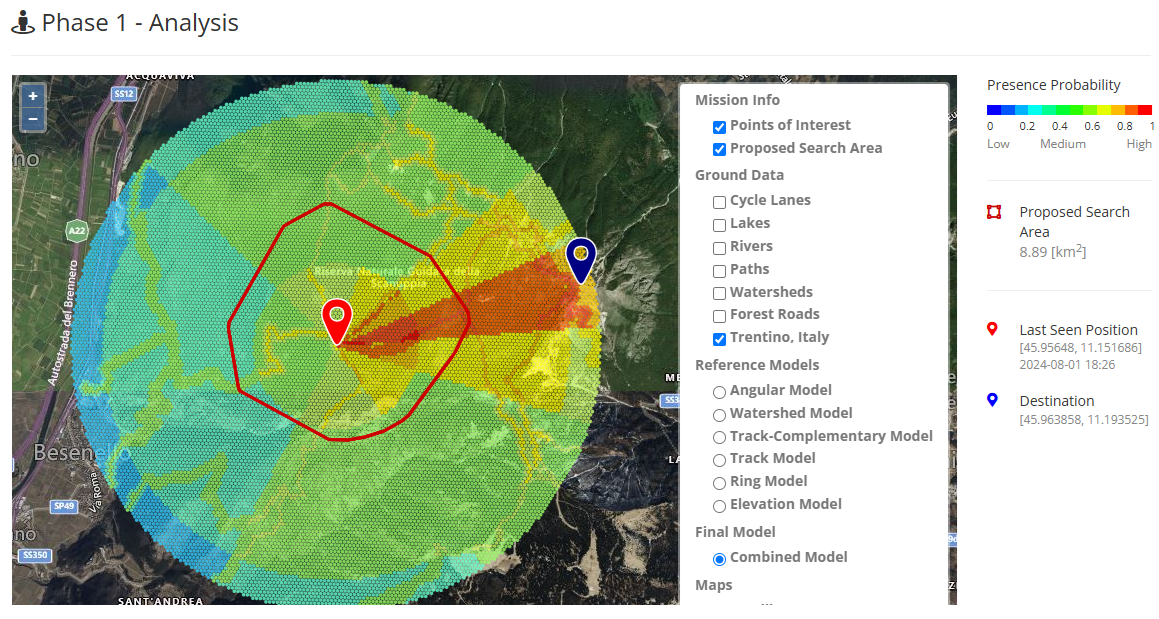
Estimates the likely areas where the person may be, using AI & heuristic models
Predicts potential paths and reachable zones based on time, terrain, and person profile
Recommends optimal deployment and supports tracking of rescue teams
Web-based platform with intuitive wizards and 3D mission visualization
Generates phase-by-phase summaries with tools for sharing and printing key data
Land Coverage
Tracks
Rivers
Assets Stations
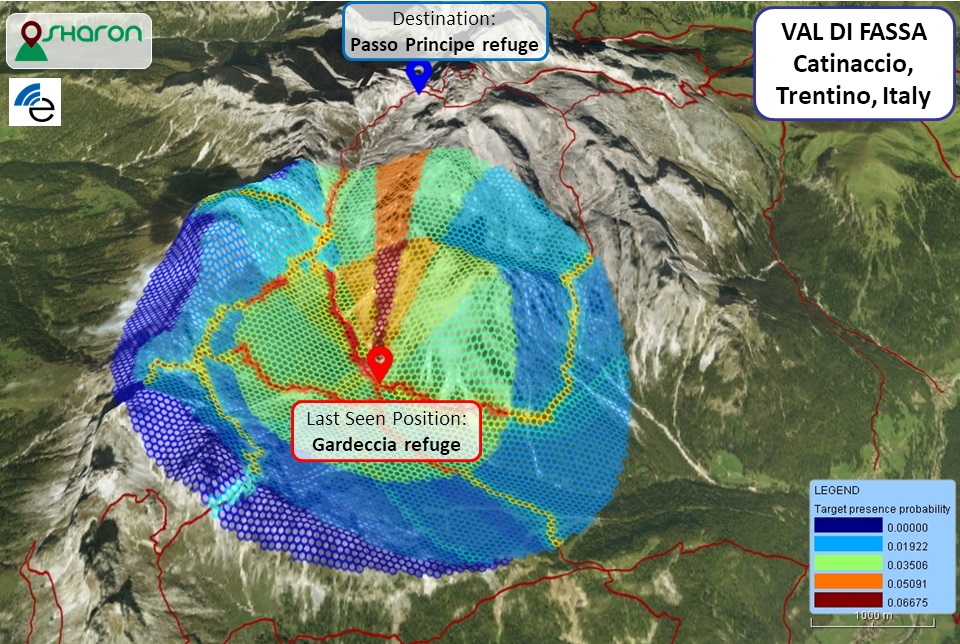
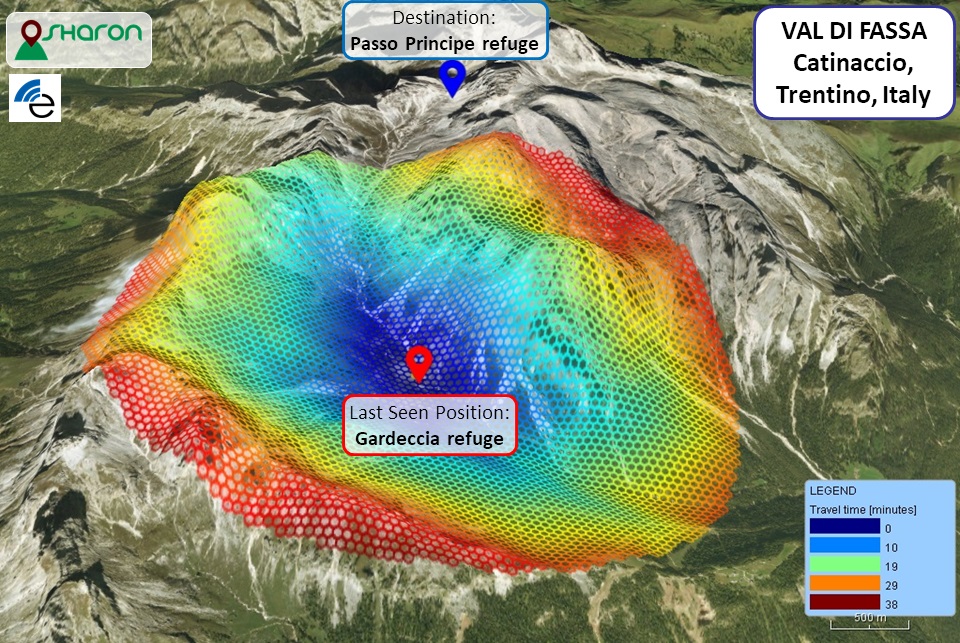
SHARON estimates the probability of presence in the nearby area according to state-of-the-art models and taking into account person's profile. The combined result is shown on interactive 3D map: cold colors indicate a low probability, hot colors indicate a higher probability
In the example on the right, the missing person was last seen at Gardeccia refuge  and it is known that his destination
and it is known that his destination  was Passo Principe
was Passo Principe
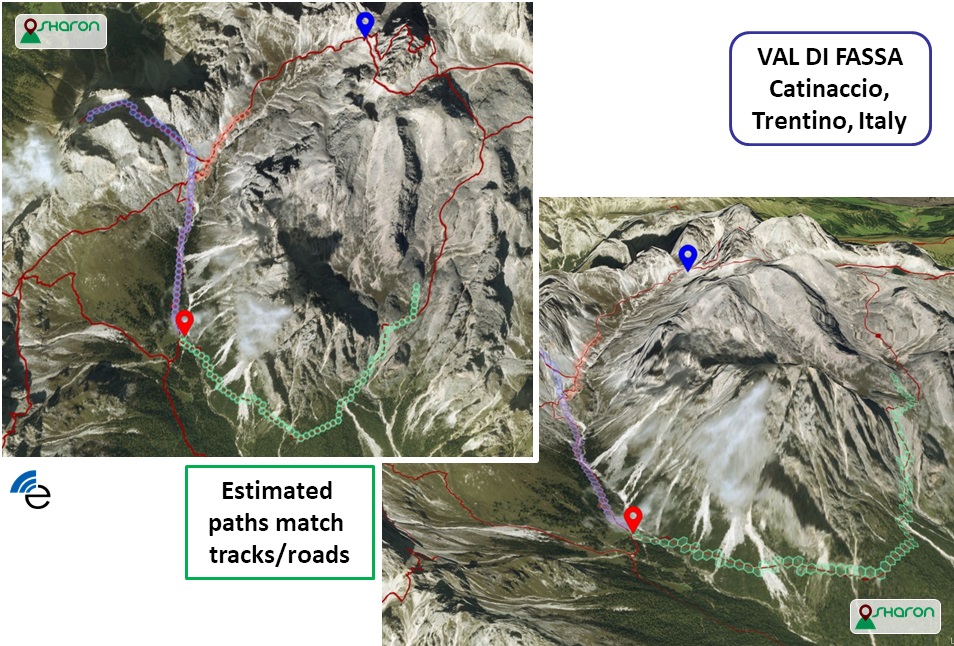
SHARON simulates fastest routes in the nearby area starting from the missing person''s last known position.
In the example on the right, the missing person is expected to move from last sighting at Gardeccia refuge on the paths around the mountains peaks.
SHARON estimates the time required to reach each cell of the grid (and its fastest path) from the last sighting position according to person's profile and terrain characteristics
The interactive 3D map highlights low travel time with cold colors and higher travel time using hotter colors
In the example on the right, the missing person is assumed to move from last sighting at Gardeccia refuge in nearby area
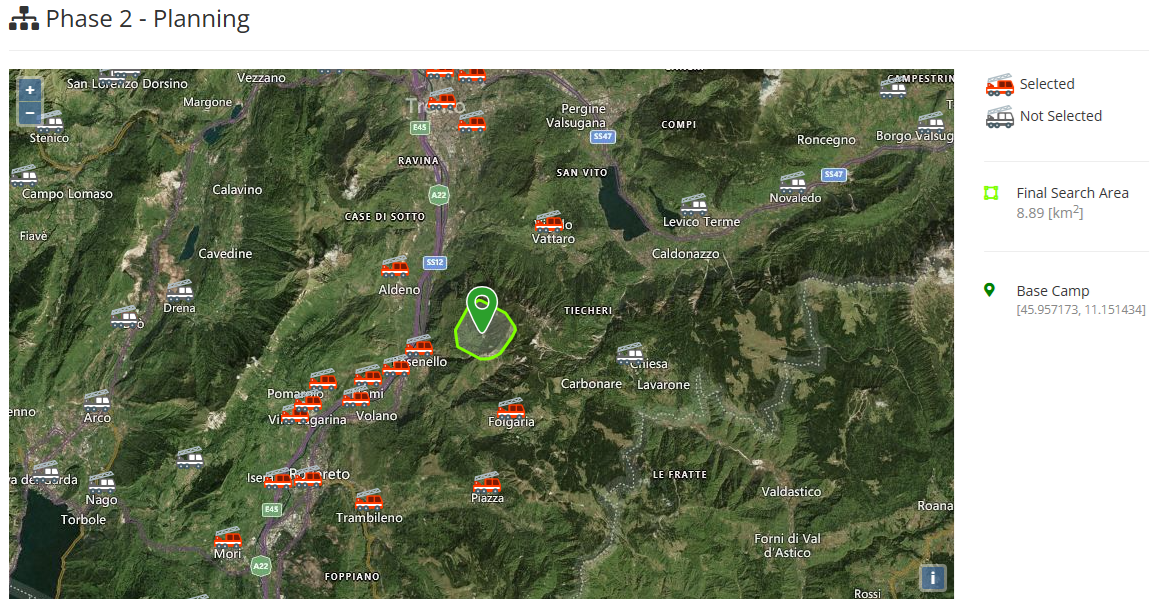
SHARON provides trade-off solutions by balancing operational efficiency with deployment costs. It considers factors such as the distance between each team member's current position and the base camp, alongside mission objectives defined by the decision-maker (e.g., time constraints, number of search units).
Search units are gathered at the base camp  , from which they are deployed to cover the search area.
, from which they are deployed to cover the search area.
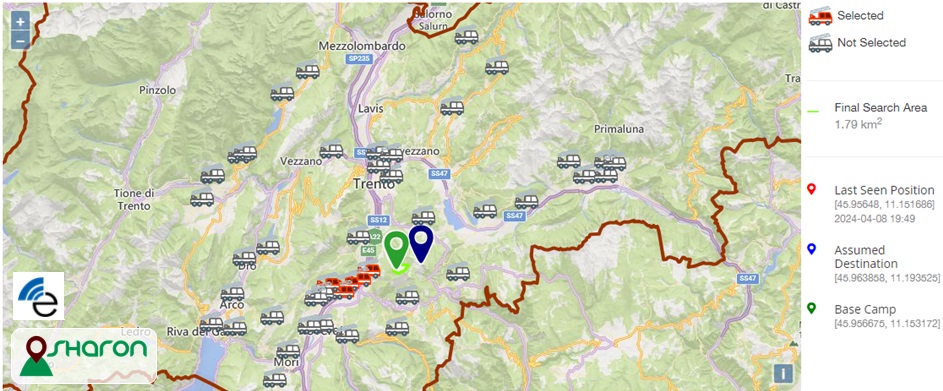
SHARON keeps information log of rescuers involved in the search operations (e.g., in/out time, position, searched area) to ensure their safety. Rescuers' position information is also exploited in real-time to update the target presence probability model.
In the example on the right, some tracks from GPS trackers on rescuers and K9 unit (dogs) are shown.














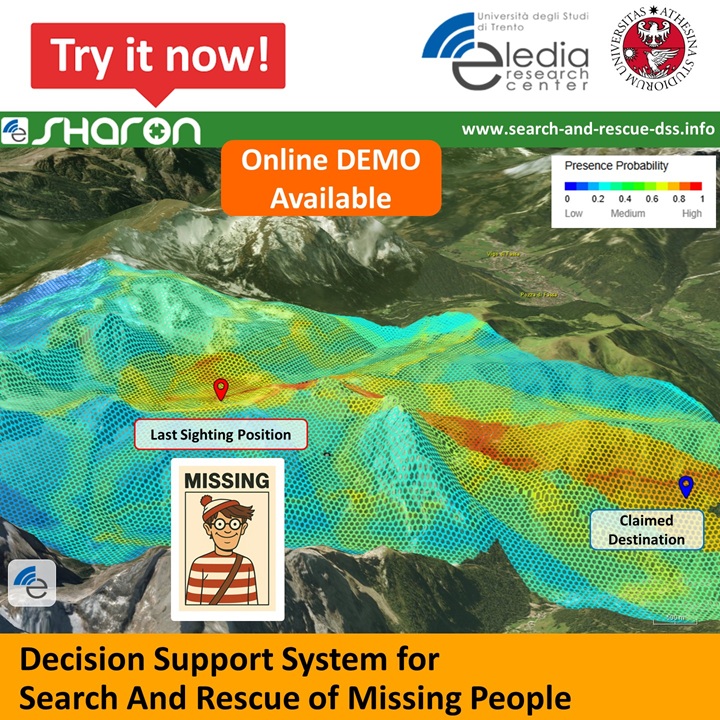
The ELEDIA Research Center is pleased to announce that the SHARON demo is now available online...
Read More
Dr. Alessandro POLO has presented the SHARON project in the TV program “Scomparsi” (Cusano Media, TV Channel 122)...
Read More
We are now expanding SHARON’s coverage across Italy, leveraging newly available, high-quality spatial datasets and digital elevation model from the Italian administration...
Read More
Dr. Alessandro Polo (ELEDIA@UniTN) has been interviewed by RAI TGR Trento on the occasion of the “Esercitazione CEI Rescue 2024”, where he presented SHARON project...
Read More